Lubin Kerhuel, Jacques Auriol
Stabilisation d'une aile volante
Rapport1
Version PDF ![]()
Projet récent en raport avec celui-ci : autopilote
2005
Remerciements
Nous remercions vivement Monsieur Carriere d'avoir accepté notre proposition de projet et de nous avoir suivis tout au long de sa réalisation.
Nous remercions aussi Valentin Arboux de son aide concernant le microcontrolleur. Ainsi que Patrick du service de reproduction de l'ESIEE pour nous avoir relié un certain nombre de documents.
Nous remercions aussi toutes les personnes partageant leurs connaissances et expériences dans ces domaines, via internet.
1 Outils Utilisés
1.1 matlab
Matlab est un logiciel d'analyse numérique très complet qui permet de tester des modèles et différents concepts de filtre à l'aide de Simulink ainsi que de visualiser les signaux logiques de l'électronique embarquée. Il nous a donc servi à la fois de simulateur et d'analyseur logique. Il a été possible de combiner les deux : simuler en temps réel un filtre à partir des données recueillies par l'analyseur logique. Une description complète des différents packages utilisés ainsi que des outils réalisés à partir de ces packages se trouve dans les annexes page .
1.2 Programmation PIC
1.2.1 MPLAB
Pour programmer le PIC, nous avons utilisé le logiciel MPLAB qui est l'outil développé par Michroship. C'est la référence pour la programmation des PICs. La version gratuite met à disposition un assembleur, un lieur ainsi qu'un débogueur. Il est possible d'ajouter des extensions de Microchip ou d'autres groupes. Nous avons ici utilisé le compilateur C CC5X.
1.2.2 Compilateur C : CC5X
L'avantage majeur de programmer en C est de bénéficier des algorithmes de calcul 16 bits et flottants. De plus, le programme ainsi réalisé gagne en lisibilité.
1.2.3 Possibilités de CC5X
Une version démonstration de CC5X est disponible à l'adresse : http://www.bknd.com.
Cette version est cependant limitée. Il existe deux limitations. La première
est la non disponibilité de toutes les bibliothèques mathématiques. Ainsi,
les seuls types qu'il est possible d'utiliser sont :
- int8 et 16 : nombre entier signé
- uns8 et 16 : nombres entiers non signés
- float24 : flottant de 24 bits ayant une résolution de 4,8 digits
Toutes les opérations ( + / * - % ...)avec ces nombres sont cependant autorisées.
La seconde limitation est une limite de la taille de code généré fixée à 1Ko. Le PIC 16f877 disposant de 8Ko, c'est dommage, mais on va voir que l'on peut contourner cette limitation dans la section Installation.
Ce compilateur a cependant un inconvénient comparé à d'autres compilateurs : il ne respecte pas la norme AINSI C. Il existe d'autres compilateurs qui respectent cette norme, mais ceux-ci n'existent pas en version démonstration. Il existe aussi de grandes différences de prix entre ces différents programmes.
1.2.4 Installation
CC5X ne s'installe pas. Il suffit de copier tous les fichiers dans un répertoire quelconque. Il faut ensuite copier le fichier Tlcc5x.ini et Cc5x.mtc dans le répertoire de MPLAB avec les autres fichiers ini. Enfin, il ne reste qu'à configurer MPLAB afin qu'il puisse utiliser ce compilateur.
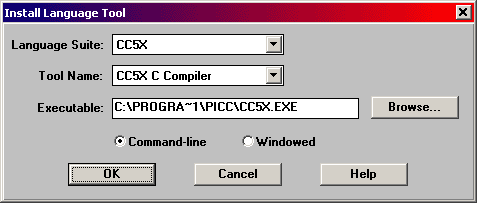{kind=link}
Dans Tools Name, il faut non seulement configurer le chemin du compilateur CC5X, mais aussi configurer le compilateur MPASM et MPLINK. On peut faire du copier-coller à partir de "language Suite : Microchip".
Á la création d'un nouveau projet, il faut indiquer avant tout le "language Tool Suite" utilisé : CC5X. ensuite, on pourra ajouter des "Node" en assembleur ou en C. Lorsque l'on utilise la programmation assembleur et C, il est nécessaire de générer du code relocalisable : rajouter dans la ligne de commande du compilateur C :
-r -xc:\progra~1\mplab\MPASMWIN.EXE -X/q -X/o+
{kind=link}
Il faut aussi ajouter dans les "Node" le fichier lkr correspondant au PIC que l'on utilise. Ce fichier permet au lieur de connaître les adresses de mémoires spécifiques du pic. On trouve ces fichiers dans le répertoire de MPLAB.(fig )
{kind=link}
Pour passer outre la limite de 1Ko de code généré du compilateur CC5X, on remarque que ce compilateur génère tout de même le fichier assembleur (.asm) correspondant au code. Il suffit donc de compiler ce fichier pour obtenir le programme final. Si plusieurs fichiers asm sont nécessaires, il suffit de créer un autre projet comprenant seulement des "node" en assembleur.
2 L'aile volante
2.1 Modélisme
2.1.1 Choix du modèle réduit
L'avion réalisé est L'IXIR II dont les plans sont sur Internet à l'adresse
http://membres.lycos.fr/afstorm/ C'est une aile volante conçue en dépron d'une
envergure de 1,25m pesant approximativement 400g. Ses caractéristiques sont
les suivantes :
- faible coût de revient
- construction rapide
- grande envergure (plus de 1m) permettant une certaine souplesse dans
la création d'un système embarqué point de vue poids et volume.
- bonne résistance aux atterrissages brusques
2.1.2 Entretien
L'aile volante est composée de dépron. C'est une sorte de polystyrene. Il est donc impératif d'utiliser des colles sans solvants car la majorité des colles contiennent des composés qui attaquent le polystyrene et le font fondre.
Les accumulateurs situés dans le nez de l'avion sont des LR03 encore notés AAA. Ce sont des Ni-Mh d'une capacité de 700 mAh.
Les points faibles du modèle sont le nez qui à tendance à s'écraser au fur et à mesure des crashes, ainsi qu'une perte de rigidité entre les deux ailes. Pour le nez, on ne peut pas faire grand chose si ce n'est consolider à l'aide de résine epoxy et de fibre de verre. Pour arranger la perte de rigidité des ailes, il est simple d'ajouter une latte rigide sous l'avion. Une règle plate de 40cm fait parfaitement l'affaire. Un autre point à surveiller est le point d'attache entre la tringlerie et les volets. En effet, l'interface entre le système mécanique rigide et le dépron est critique. Pour les prochains modèles, on pourra renforcer le nez en collant avec de la résine un CD sous le nez afin de répartir les choques, et placer deux morceaux de CD dans les volets aux endroits ou sont situées les chapes.
2.2 Modèle mathématique
L'aile étant un modèle réduit, il n'existe pas de modèle précis caractérisant
son vol. En recoupant les équations trouvées dans plusieurs sites internet,
Nous sommes parvenus au modèle décrit ici.
Parmi les sites les plus intéressants, le site
http://www.chez.com/aerodynamique/stabilite.html qui décrit le fonctionnement
physique d'un planeur téléguidé. Le site
http://www.para-net.org/articles/aero/ dédié aux parapentes, mais qui décrit
remarquablement bien les phénomènes liés aux ailes. Tous les profils sont
expliqués ici. Et enfin,
http://aeropic.free.fr/pages/modelisme/theorie/theorie.htm qui est un site
dédié aux foamies qui sont des ailes volantes téléguidées construites en polystyrène.
2 Ces ailes étant des
autostables, on y trouvera des informations sur ce type de profil.
La définition des variables est la suivante :
- q : Angle de plané
- a : Angle d'incidence
- f : Angle des volets avec la position neutre
{kind=link}
La force gravitationnelle s'écrit :
|
(1) |
|
(2) |
Action de l'angle des volets f sur la portance : Le coefficient de portance Cp varie linéairement, proportionnellement à l'angle des volets f pour des angles inférieurs à 15° :
|
(3) |
ou A est un coefficient qui varie selon que f soit positif (volet levé) ou négatif. La variation de portance est plus importante
lorsque f est positif. Nous négligerons ces paramètres dans le modèle en considérant A
constant.
f0 est l'angle pour lequel la portance devient nulle. Cette configuration
de vol n'existe pas forcément. Pour trouver f0, on prolonge la droite donnant la portance en fonction de l'angle
a.
Prise en compte de l'incidence a : L'incidence est l'angle que fait l'axe longitudinal de l'aile
avec la direction de plané, donc avec l'air.
Le comportement de Cp varie proportionnellement a a. Pour une vitesse donnée, on peut écrire la relation suivante :
|
(4) |
a0 est l'angle d'incidence pour lequel la portance est nulle. Cette angle varie de 0° à +12° suivant les profils. Il est généralement voisin de +5°.
En combinant les équations (2)(3) et (4), on obtient pour le coefficient de portance :
|
(5) |
un jeu d'équations qui définissent la portance qu'engendre l'aile s'en déduit :
|
(6) |
Projection sur les axes X et Z Avec la convention de signe choisie, on obtient sur les axes X et Z :
|
(7) |
Mouvement de rotation de l'aile : Si l'on ne prend pas
en compte la résultante aérodynamique de l'aile, l'avancement de celle-ci
dans l'air crée un couple Cm0 dû aux frottements et a des phénomènes
d'écoulements. Sur les différents types de profils, qu'ils soient classique
ou autostables, ce couple tend à faire croître l'incidence de l'aile.
Le centre de poussée qui est le point d'application de la résultante aérodynamique
est situé sur la corde du profil et se déplace en fonction de l'incidence.
Sur une aile classique, il se déplace vers l'avant lorsque l'incidence augmente
renforçant ainsi le moment Cm0. L'aile est instable : L'incidence
augmente jusqu'à ce que l'écoulement sur l'aile ne soit plus laminaire. La
portance disparaît alors brusquement. La résultante est principalement constituée
de la traînée et le centre de portance recule aussi brusquement entraînant
l'abattement de l'aile.
Contrairement à ces profils d'aile classique, l'aile volante à un profil autostable.
La résultante aérodynamique se déplace vers l'arrière lorsque l'incidence
croît. Il en résulte un mouvement piqueur de l'aile qui tend à la ramener
vers son incidence initiale lorsqu'elle en est écartée.
Le couple ainsi engendré s'écrit :
|
(8) |
{kind=link}
La variation de l'angle d'incidence a s'en déduit alors :
|
(9) |
On voit sur les équations () et (3) que les volets ont une influence sur le couple au travers de Cp.
Principe fondamentale de la dynamique On se place ici
dans le repère terrestre que l'on appelle x et z. Vz correspond
à la vitesse de chute verticale de l'avion et Vz correspond sa
vitesse horizontale. Les équations précédentes ont montré une dépendance par
rapport à la vitesse de l'avion en V2. V2 ne dépend
pas du repère choisi. Le choix de ce repère est justifié par le calcul de
l'angle de plané q qui se déduit directement des vitesses Vx et Vz comme
nous le montrerons un peu plus loin.
|
(10) |
{kind=link}
|
(11) |
La variation de l'angle de plané q est couplé avec la variation de l'angle d'incidence a. L'évolution de celui se déduit alors des expressions (9) et (11) :
|
(12) |
Condition de stabilité : Pour que l'avion soit stable,
il faut que le moment de l'aile le fasse cabrer lorsque l'incidence est trop
faible, et qu'il l'entraîne à piquer lorsque l'incidence est trop importante.
Cela se traduit ainsi :
|
(13) |
|
(14) |
3 Choix des composants
3.1 Les capteurs
Le choix des capteurs dépend des grandeurs des phénomènes mesurés. Nous allons nous fier à notre connaissance approximative de l'avion pour caractériser l'ordre de grandeur des paramètres limites. On décide :
- Vitesse de vole compris entre 2 et 10 m/s
- Vitesse angulaire inférieure à 180 deg/s 3
Pour ce projet, nous avons décidé d'utiliser des gyromètres miniatures. Ces composants sont très récents, et la société Murata est la seule que nous avons trouvé, à en proposer au grand public. Les deux gyromètres dans le commerce sont les suivants :
ENV05F-03
Caractéristiques :
- Poids 50g
- Vitesse Angulaire maximum 60deg/s
- échelle de sortie 27mV/deg
- coût 151E (radiospares)
ENC03-J
Caractéristiques :- Poids < 1g
- Vitesse Angulaire maximum 300deg/s
- échelle de sortie .63mV/deg
- coût 53E (radiospares)
Le premier modèle présenté (ENV05F-03) est le plus précis, et sans doute le mieux calibré pour les vitesses angulaires prises par l'avion lors d'un vol stabilisé. Cependant, il est lourd, encombrant et onéreux. C'est pourquoi dans un premier temps, nous allons tester les résultats obtenus avec un ENC03-J. ( En fonction des résultats obtenus, on avisera... )
3.2 le microcontrôleur
Le micro-contrôleur employé est un PIC de chez micochip, choisi pour sa simplicité d'utilisation, qui entraînera un poids embarqué minimum. Le modèle retenu est le 16F877. Ce modèle est très répandu. Il dispose de 8K de mémoire programmable et de 8 convertisseurs analogiques numériques 10 bits. Il est cadencé a une fréquence de 20MHz. Pour fonctionner, il n'a besoin que d'un quartz de la fréquence souhaitée et de deux capacités de 33pF. C'est un micro-contrôleur RISC : Il a peu d'instructions (35 au total) mais exécute toutes les instructions en quatre cycles. Chaque instruction est codée sur 1 octet. La mémoire se divise en trois catégories :
La mémoire morte contient le programme. Elle est de type flash. Cela signifie qu' elle n'a pas besoin d'énergie pour se maintenir. On peut donc débrancher et rebrancher le micro-contrôleur. De plus, elle est effaçable. Il est alors possible de recharger un nouveau programme dans le PIC. Elle se programme avec un programmateur dédié. Celui-ci peut être le même que celui du PIC 16F84. On trouve des schémas simples de ce programmateur sur Internet.
La mémoire vive permet de stocker les variables liées à l'exécution du programme. Celle-ci est totalement effacée lorsque le composant est non alimenté.
L'EEPROM permet de stocker de manière durable des variables. Son utilisation est cependant bien plus contraignante que la mémoire vive. On ne l'utilise donc que lorsque le micro-contrôleur a besoin de stocker des données qui serviront à la prochaine utilisation de celui-ci, ou lorsque l'on veut récupérer les donnés dans un ordinateur, si on ne peux pas utiliser le protocole de communication décrit dans les annexes (enregistrement durant un vol par exemple).
4 Montage électronique
Le montage électronique est très simple. Deux condensateurs et un quartz permettent de faire fonctionner le micro-contrôleur. Le récepteur est connecté à deux entrées numériques du micro-contrôleur. Deux sorties numérique du micro-contrôleur sont connectés aux servos. Enfin, le montage amplificateur du gyromètre est connecté à une entrée analogique du micro-contrôleur.
4.1 Amplification du signal du gyromètre
Au départ, nous pensions réaliser cette amplification à l'aide d'un Amplificateur Opérationnel, mais une erreur de choix du composant ne nous à pas permis de réaliser ce montage avec une alimentation de 0 - 5V. Nous avons finalement amplifié le signal du gyromètre à l'aide de deux transistors montés en Darlington. Les deux résistances sont respectivement de 100 Ohms et de 1Kohm. Le b du transistor est d'environ 565. La sortie du gyromètre est connectée au travers des deux transistors à la résistance de 100 Ohms.
5 Stabilisation
5.1 Asservissement de vitesse angulaire
Á partir du montage effectué, plusieurs types de stabilisateur sont
envisageables. La première, qui est la plus facile à réaliser est l'asservissement
de commande angulaire. La télécommande permet de contrôler la profondeur comme
un avion téléguidé classique, mais pour le roulis, elle donne une commande
de vitesse angulaire. Lorsque le manche est au neutre, l'avion doit avoir
une vitesse de roulis nulle. Si une rafale de vent perturbe l'avion, le calculateur
doit compenser la vitesse de rotation de celui-ci en actionnant les volets.
La correction que nous avons utilisée ici est une simple correction proportionnelle.
La formule ressemble à cela :
|
5.2 Stabilisation autonome
Nous avons effectué une tentative de Stabilisation autonome. En intégrant le signal du gyromètre numériquement, le calculateur devait être capable de connaître sa position relative à la position qu'avait l'avion au moment ou l'on a placé le dispositif sous tension. Cependant, le bruit engendré par le gyromètre et l'amplificateur monté derrière fait diverger l'intégrale en quelques secondes. Cette divergence est encore plus rapide lorsque l'avion est en mouvement. Nous n'avons donc pas pu expérimenter cette méthode en vol. Il faudrait testé avec le gyromètre plus précis qui à été décrit précédemment.
6 Conclusion
6.1 Pour aller plus loin
Des petites améliorations faciles sont possibles comme l'ajout de jumper sur le montage électronique qui permettrait de sélectionner les routines exécutées par le micro-contrôleur. Cela permettrait de gagner du temps car le chargement du programme dans le micro-contrôleur est longue.
Il est aussi possible d'améliorer le résultat de la conversion indiquant au micro-contrôleur les deux tensions de références entre lesquelles le signal analogique varie. Actuellement, le micro-contrôleur effectue cette conversion entre 0 et 5V, mais avec quatre résistances, il est possible d'améliorer sensiblement la résolution.
Il est aussi nécessaire de modifier la routine qui récupère les données du récepteur. Dans sa version actuelle, le programme attend le signal des deux voies l'une après l'autre. Or si on inverse les voies, une donnée sur deux sera alors récupérée. Il est possible d'écrire une routine capable de récupérer les deux voies simultanément ou dans "n'importe quel sens".
Pour continuer le projet, il faudrait réétudier le modèle mathématique sous matlab. Une fois un modèle fonctionnel trouvé, il faudrait imaginer des experiences permettant de relever les caractéristiques de l'avion. On peux ensuite aussi caractériser les servos moteurs contenus dans les ailes, ainsi que faire une étude précise des mouvements des ailerons en fonction de la position des servos. Cela revient à étudier géométriquement la tringlerie.
Il faudrait tester d'autres capteurs. Ainsi, il existe des gyromètres plus précis permettant peut être de faire une stabilisation autonome comme il était prévu de réaliser au début du projet. On peut aussi ajouter un "niveau à bulle électronique" permettant de recaler l'intégrale du gyromètre. Ensuite, il est sans doute possible de réaliser un capteur d'incidence et un capteur de vitesse.
Pour la partie programme, on peut imaginer un système d'apprentissage ou l'avion apprendrait au fur et à mesure des vols ses propres caractéristiques.
6.2 Bilan
6.2.1 Objectif initiale
L'objectif initial était de stabiliser l'avion dans le sens ou, connaissant
sa position par rapport au sol, il devait être capable de rétablir son horizontal,
et de corriger sa trajectoire. L'avion devait donc voler en ligne droite.
Deux difficultés ne nous ont pas permis de réaliser cela. La première difficulté
était la réalisation d'un modèle non linéaire sous matlab. Le modèle que nous
avons réalisé diverge. Ensuite, un problème de capteur s'est posé. Le gyromètre
que nous avons employé ne semble pas être précis pour cette application. A
l'origine, ce gyromètre est destiné à analyser les mouvements pour stabiliser
l'image des camescopes par exemple.
6.2.2 Connaissances acquises
Bien que l'objectif initiale ne soit pas atteint, nous sommes très contents d'avoir réalisé ce projet. Tout d'abord, En un temps relativement court4, nous avons réussi en partant de rien, à réaliser une aile dont les caractéristiques de vole sont très bonne, ainsi qu'un montage électronique embarqué fonctionnel. Et Surtout, l'asservissement en commande angulaire du roulis de l'avion fonctionne bien.
De plus, nous avons beaucoup appris pendant ce projet. Tout d'abord, nous connaissons maintenant le fonctionnement générale de Matlab. Plus particulièrement, nous maîtrisons bien Simulink, Stateflow et certains packages comme XPc Target et nous savons mettre en oeuvre quelques astuces permettant d'étendre les capacités de matlab.
Nous avons aussi appris à programmer en C sur le pic ainsi qu'à mélanger du C et de l'assembleur, ce qui permet un gain de temps considérable sur la conception de programme.
A Matlab
Matlab V6.0.0.88 Release 12 a été utilisé lors de la réalisation de ce projet. Il tournait sous Windows 2000.
A.1 Analyse Temps Réel : Real Time Workshop & XPc Target
Les packages suivants ont été utilisés :
- Real Time Workshop
- XPc Target
- Stateflow Coder : permet de générer un code correspondant au schéma
- Compilateur C : Visual Studio 98 5
- un petit driver permettant d'accéder aux ports dans simulink même
http://www.ntportlibrary.com
Matlab n'arrive pas toujours à reconnaître Microsoft Visual C 98. Il est parfois nécessaire de modifier les fichiers .m utilisés par le processus de compilation.
A.1.1 Description
Le package Real Time Workshop permet de générer du code source en plusieurs
langages dont C et ada. Le compilateur peut ensuite compiler ces fichiers
afin de permettre une analyse en temps réel.
Il est très intéressant de pouvoir récupérer des données dans Matlab. Pour
cela, l'idéal est de relier le pic a Matlab. Cependant, Windows rend l'accès
aux ports difficile et l'accès aux ports n'est pas prévu dans la bibliothèque
standard de simulink.
Le package XPc Target permet d'exécuter les simulations des schémas provenant
de Simulink sur un second ordinateur. Il est intéressant de noter que XPc
Target comprend des blocs permettant d'écrire et de lire des données sur les
ports du PC servant pour la simulation. Le port parallèle LPT1 peut donc servir
pour acquérir et exporter des données. Les adresses de ces trois registres
sont généralement 278h, 279h et 27Ah. On peut facilement vérifier ces données
dans le bios.
Le driver permettant d'accéder aux ports permet de ne pas utiliser le package XPc target. En réalité, le driver ne contient pas de bloc dans simulink, mais ajoute une fonction matport à matlab. Avec cette commande, il est alors possible d'éditer un bloc simulink permettant de lire ou d'écrire dans le port pendant une simulation sur l'ordinateur sur lequel on exécute matlab. L'avantage de cette méthode est qu'on a plus besoin d'avoir deux ordinateurs pour réaliser une simulation. De plus, on gagne en temps de compilation et en temps de téléchargement. En revanche, la simulation avec acquisition en temps réel sous windows est bien plus lente. Windows étant un système multitâche, le temps réel n'est pas respecté et surtout, Simulink ne sait pas simuler en temps réel. Simulink est un outil permettant de réaliser des simulations, mais il les effectue le plus rapidement possible. La seule véritable application de ce driver est donc le déboggage de Stateflow lorsque celui-ci communique avec un système extérieur.
A.1.2 Protocole de Communication Matlab - Pic
En créant un petit diagramme dans Stateflow(fig. ), il a été possible de créer un protocole afin que Matlab puisse communiquer avec le micro-contrôleur. Nous avons ainsi pu visualiser les variables du micro-contrôleur en temps réel sur l'ordinateur "target". Matlab pouvait aussi envoyer des données au micro-contrôleur.
{kind=link}
Le protocole réalisé a les caractéristiques suivantes :
- Permet la transmission de données dans les deux sens
- Transmet des octets de 8 bits
- Seulement 3 fils utilisés + un fil de masse. Donc seulement trois ports
du microcontrôleur condamnés.
- La synchronisation est automatique. Il est possible de déconnecter l'un
des deux éléments et de le reconnecter.
- Pas d'horloge : les deux éléments se répondent l'un l'autre
Les routines RSsend et RSreceive permettent d'émettre et de recevoir des données dans le registre W. Ces deux routines sont bloquantes. Les données reçues peuvent être erronées lorsque la synchronisation n'est pas encore terminée.
Le bloc Stateflow de Matlab a en entrée une constante
qui peut prendre les valeurs 0 ou 1 respectivement pour configurer le bloc
en Réception seule ou en Réception/Emission. Lorsque celui-ci est configuré
en Réception/Emission, Matlab teste si le PIC est en train d'émettre. Si le
pic n'émet pas, alors Matlab considère que c'est à lui d'envoyer une donnée.
L'ordinateur "target" a été considéré comme lent devant le micro-contrôleur
lors de la réalisation de ce protocole. Le protocole est symétrique, à ceci
près que Matlab-Stateflow comprend des "Time Out" nécessaires pour une synchronisation
sure.
L'envoi des données se fait en réalité sur 10 bits. Le premier bit envoyé est toujours 0 alors que le dernier bit envoyé est toujours 1. Cette caractéristique est utilisée lors la synchronisation. Cette méthode a un avantage de simplicité mais un inconvénient si dans la suite d'octets envoyée par exemple, il existe le motif constitué d'un 1 suivi 6 bits de données plus loin au lieu de 10, et pour terminer un 0, il est possible que la synchronisation ne s'effectue pas. Dans ce cas, les données lues seront erronées.
Pour utiliser ce protocole, il suffit de connecter Tx sur Rx, Rx sur Tx et RTx, RTx2 et TRx sur le même fil et sur une pine de lecture/écriture du PC. Celle-ci peut être réalisée en connectant une sortie et une entrée ensemble sur le port lpt1. Cette solution à été utilisée ici. Il a été nécessaire d'ajouter une résistance entre ces deux pines. Nous utilisons un potentiomètre qui nous permet d'adapter le montage à plusieurs ordinateurs. La valeur de la résistance équivalente utilisée est de l'ordre de 400 ohms. Si Matlab n'envoie pas de données, ce potentiomètre n'est pas nécessaire. Pour faire des tests de fonctionnement, il est plus judicieux de mettre une résistance importante, voire pas de résistance du tout.
Les trois fils sont initialement à 1. Lors de l'émission d'une donnée, le fil de l'émetteur RTx passe à 0 ainsi que le Tx. Le destinataire met alors sa ligne Tx à 0. Le Tx du récepteur est utilisé comme accusé de réception. l'émetteur inverse alors RTx qui passe à 1, et place dans Tx la première donnée. Le récepteur inverse à son tour Tx et ainsi de suite.
A.2 Commandes et infos Utiles
mex -setup permet de sélectionner le compilateur C utilisé par Matlab. Avec xPC Target, le compilateur Visual C++ V6 ou V5 est nécessaire.
xpcsetup permet de configurer les options de xPC target. On configure notamment la méthode de communication entre les ordinateurs host et target. On choisi aussi la destination de la simulation. Celle-ci peut être un ordinateur target ayant démarré grâce à la diskette de démarrage que l'on peut aussi créer ici. On peut aussi faire une simulation sur un ordinateur qui a démarré sous un système DOS et il est aussi possible de créer une diskette de boot avec le schéma inclus. Dans les deux derniers cas, la communication entre les deux ordinateurs n'est plus nécessaire.
www.mathworks.com est le site officiel de Matlab. En plus de contenir toute l'aide en ligne, il contient des informations en plus sur les packages ainsi qu'une bonne description de ceux-ci avec des exemples d'utilisation.
A.3 Outils potentiellement intéressants
Le Package Windows Target semble très intéressant. Il
permettrait d'utiliser les blocs du package xPC Target (notamment le bloc
permettant d'acceder aux ports du PC) dans une simulation en temps réel réalisée
dans windows même. Il serait alors possible d'utiliser le protocole Matlab-Pic
décrit plus haut. L'avantage est que l'on n'aurait besoin que d'une seule
machine. L'inconvénient comparé à xPC Target serait une exécution de la simulation
plus lente ou plus précisément, une valeur maximum de fréquence de simulation
plus faible comparée au même modèle exécuté sour xPC Target sur une même machine.
Cette lenteur est due à l'exécution des multiples taches windows en parallèle.
Cependant, cet inconvénient peut être relativisé car les ordinateurs utilisés
comme Target dans xPC Target sont en général des machines de récupération,
donc plutôt lentes.
Un autre package winTarget ressemble au package décrit ici, mais est en plus
gratuit. Disponible à l'adresse :
http://www.wfw.wtb.tue.nl/control/home_of_wintarget.htm
Real-Time Workshop Embedded Coder permet de générer du code C à partir d'un schéma Simulink et d'un diagramme conçu avec Stateflow en supposant Stateflow Coder installé. Le code C ainsi généré est peut être implémentable dans un micro-contrôleur si l'on dispose d'un compilateur C pour ce dernier. Si on arrive à effectuer ceci, on obtient un gain de temps considérable car il suffit alors de dessiner le programme avec Simulink et Stateflow pour pouvoir le faire tourner dans un micro-contrôleur.
B Listing Programme
B.1 Parti C
B.2 Routines Assembleur
References
- []
- A.Carrière,Y.Hamam, F.Rocaries Système dynamiques et systèmes asservis : la représentation d'état, poly Esiee, 2001.
- []
- Site internet sur les parapentes :
- [#1http://www.ntportlibrary.com : Site proposant un driver permettant a matlab d'accéder aux ports du PC
- [#1http://www.mathworks.com : Site de support de Matlab
- [#1 http://membres.lycos.fr/afstorm : Plan de l'avion
- [#1http://www.chez.com/aerodynamique : Physique du planneur
Footnotes:
1Une copie de ce rapport se trouve sur le site http://lubink.free.fr
2l'aile volante réalisée ici est en dépron. La technique de construction n'est pas comparable à celle des foamies.
3Lorsque les commandes sont braquées
4Projet d'environs un mois et demi
5Nécessaire
pour Xpc Target
File translated from TEX by TTH, version 3.11.
On 27 Jun 2002, 11:38.